Stepper Motor Driver Unipolar & Bipolar Module ULN2003
- Was RM10.00
-
RM5.00
- Product Code: stepper-board-UL2003
- Availability: In Stock





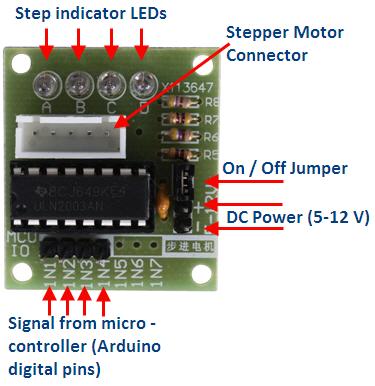
The ULN2003 stepper motor driver board allows you to easily control the 28BYJ-48 stepper motor from a microcontroller, like the Arduino Uno. One side of the board side has a 5 wire socket where the cable from the stepper motor hooks up and 4 LEDs to indicate which coil is currently powered. The motor cable only goes in one way, which always helps.
On the side you have a motor on / off jumper (keep it on to enable power to the stepper). The two pins below the 4 resistors, is where you provide power to the stepper. Note that powering the stepper from the 5V rail of the Arduino is not recommended. A separate 5-12V 1Amp power supply or battery pack should be used, as the motor may drain more current than the microcontroller can handle and could potentially damage it. In the middle of the board we have the ULN2003 chip. At the bottom are the 4 control inputs that should be connected to four Arduino digital pins.
Features
Specifications
Motor Connections
The diagram to the left shows the 5 wires connected to the motor. Plug the motor into the driver board.
The Arduino should be connected to the ULN2003 driver board as shown below:
Driving the Motor
You should drive the motor by enabling the pins in an 8-phase order as shown to the left (Clockwise movement):
For anti-clockwise motion, simply follow the sequence in reverse

// This Arduino example demonstrates bidirectional operation of a
// 28BYJ-48, using a ULN2003 interface board to drive the stepper.
// The 28BYJ-48 motor is a 4-phase, 8-beat motor, geared down by
// a factor of 68. One bipolar winding is on motor pins 1 & 3 and
// the other on motor pins 2 & 4. The step angle is 5.625/64 and the
// operating Frequency is 100pps. Current draw is 92mA.
////////////////////////////////////////////////
//declare variables for the motor pins
int motorPin1 = 8; // Blue - 28BYJ48 pin 1
int motorPin2 = 9; // Pink - 28BYJ48 pin 2
int motorPin3 = 10; // Yellow - 28BYJ48 pin 3
int motorPin4 = 11; // Orange - 28BYJ48 pin 4
// Red - 28BYJ48 pin 5 (VCC)
int motorSpeed = 1200; //variable to set stepper speed
int count = 0; // count of steps made
int countsperrev = 512; // number of steps per full revolution
int lookup[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001};
//////////////////////////////////////////////////////////////////////////////
void setup() {
//declare the motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
Serial.begin(9600);
}
//////////////////////////////////////////////////////////////////////////////
void loop(){
if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else
anticlockwise();
count++;
}
//////////////////////////////////////////////////////////////////////////////
//set pins to ULN2003 high in sequence from 1 to 4
//delay "motorSpeed" between each pin setting (to determine speed)
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise()
{
for(int i = 7; i >= 0; i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorPin1, bitRead(lookup[out], 0));
digitalWrite(motorPin2, bitRead(lookup[out], 1));
digitalWrite(motorPin3, bitRead(lookup[out], 2));
digitalWrite(motorPin4, bitRead(lookup[out], 3));
}
Suggestion:

Tags: Stepper, Motor Driver


")
![Stepper Motor 28BYJ [5v / 12v] 4-Phase 5-Wire](https://qqtrading.com.my/image/cache/catalog/Products/Motor/Stepper/E-TN-1pcs-DC-5V-Stepper-Motor-ULN2003-Driver-Test-Module-Board-for-Arduino-Free-Shipping-80x80.jpg "Stepper Motor 28BYJ [5v / 12v] 4-Phase 5-Wire")
![Stepper Motor PM25S [5v] 4-Phase 5-Wire](https://qqtrading.com.my/image/cache/catalog/Products/Motor/Stepper/PM25S-024-ZH89-font-b-NMB-b-font-5V-stepper-font-b-motor-b-font-PM25S-80x80.jpg "Stepper Motor PM25S [5v] 4-Phase 5-Wire")


-80x80.jpg "Stepper Motor Driver - (Peak 4.2A) DM542 w/ Box")