Microwave Motion Sensor Module (HW-MS03)
-
RM12.00
- Product Code: 001-0038
- Availability: In Stock
")
")
Description:
Output models Category: Digital sensor
How it works: vibration sensor
Sensor Type: 24GHz radar sensors
Material: Mixture
Specification:
Precautions:
About Power
Recommends qualified DC power supply, that is, the output voltage,
current and ripple factor are all standard DC power supplies, otherwise Movies
Rang stability of this product, there may be some exceptions,
such as false, no newspaper, circulating auto-start, and so on.
About false positives
1, to ensure the eligibility of the power supply, please refer to the first item;
2, the test to ensure that the products being tested are not surrounding a moving object (sensing range);
3, approximately 10s-30s after power initialization time,
during this period are non-normal induction, may cause false positives false image;
4, when tested indoors, the sensor is relatively sensitive to the surrounding need to remain static,
and to ensure that the end of the first sensor signal before the next cycle
Step test; outdoor test, be sure to pay attention to the dynamics of the surrounding environment,
such as birds, pedestrians, passing cars and the like;
5, the signal current of the module output is very weak,
high-power direct drive through the drive tube, it may easily lead to false positives.
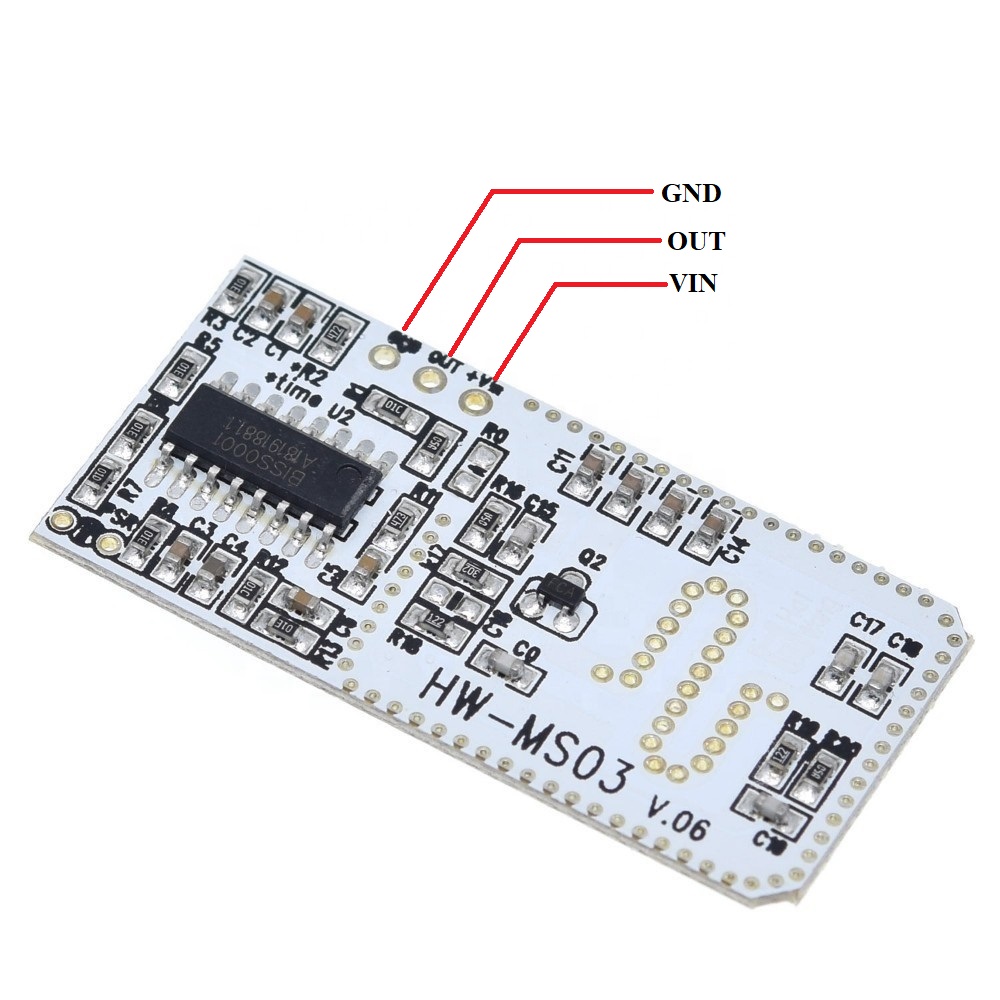
Pinouts:
Out — Sensor Output (HIGH (3.3 V) Motion detected/LOW (0 V) idle)
VIN+ — 3.3V
GND — Ground/0 V
Components Required:
Wiring Diagram:
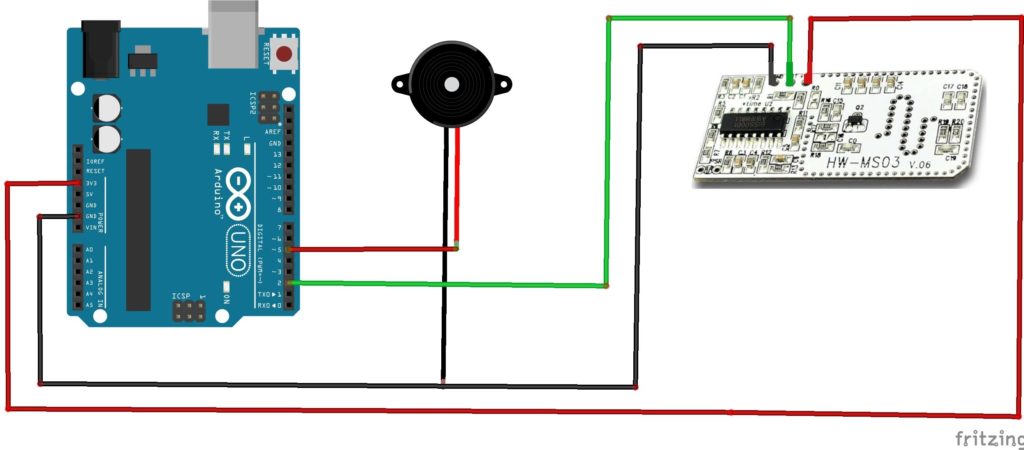
Wiring Connections Details:
| Arduino | Buzzer | HW MS03 |
|---|---|---|
| +3.3V | ----- | Vin |
| GND | GND | GND |
| 5 | Buzzer Pin Positive | ----- |
| 2 | ----- | Out |
Code:
#define inputPin 2
#define Buzzer_pin 5
void setup()
{
pinMode(inputPin, INPUT); // Initializing the declared inputPin as INPUT
pinMode(Buzzer_pin, OUTPUT); // Initializing the declared Buzzer_pin as OUTPUT
Serial.begin(9600);
Serial.println("HW-MS03 Radar test");
}
void loop()
{
bool reading = digitalRead(inputPin);
if (reading == HIGH)
{
Serial.println("MOVEMENT!");
digitalWrite(Buzzer_pin, HIGH);
}
if (reading == LOW)
{
Serial.println("NO MOVEMENT!");
digitalWrite(Buzzer_pin, LOW);
}
delay(500); // wait 0.5 second
}

